I am currently the a software co-lead for Michigan Autonomous Aerial
Vehicles (MAAV). I specialize in computer vision and computer networking.
With our end goal being to compete in the International Aerial
Robotics Competition (IARC) and to educate new members on relevant
computer science concepts such as computer networking and machine
learning, my job is to build up MAAV both in time for IARC but also
for the future to ensure that MAAV is a club where like-minded engineers
have a chance to get real tangible experience working on a real-world engineering
challenge.
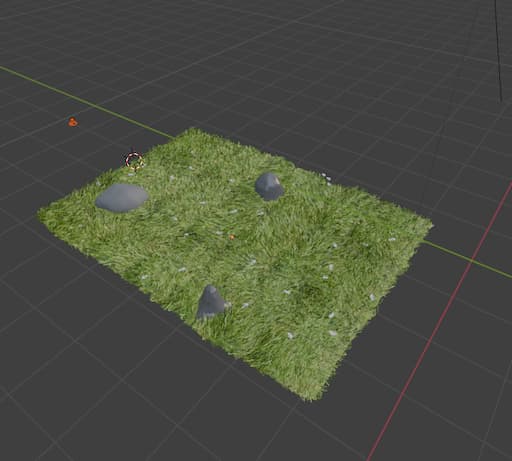
This year's IARC mission involves applying machine learning computer vision models
to detect objects placed on the ground to a fleet of 4 drones. To train the machine learning model,
we utilize a combination of real-world training images as well as computer-generated training images made
in Blender. To ensure that the drones are able to communicate with each other, I led the design and implementation of a distributed
system network using TCP and UDP sockets to allow for the drones to aggregate the computer vision model results
into a unified map of all the detections. To autonomously initialize and manage the fleet, I leveraged Linux's internal scheduling to
run code autonomously and integrated our system to a server hosted on our comepetition team's
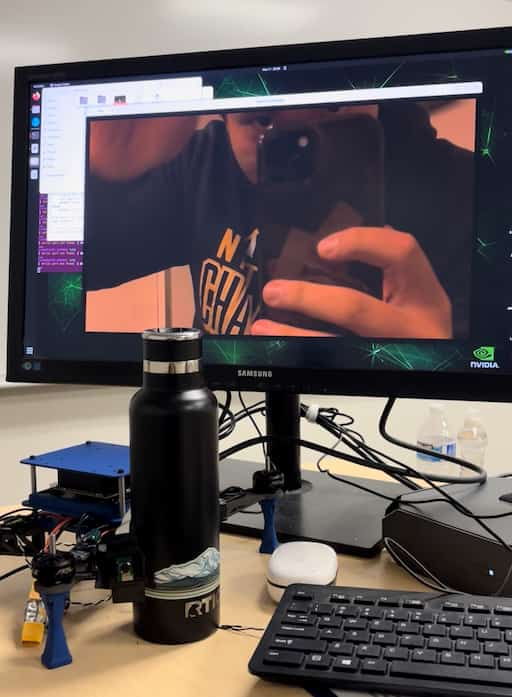
website. Our team overall has done a great job in construction and development of the drone,
which can be seen as the second image in the first column.
Outside of gearing up for competition, I have also contributed towards MAAV's mission
towards becoming a more inclusive club by streamlining the new member recruitment process.
I have restructured the team's website to be more interactive and more engaing. I also set up
an auto-emailing service for interested new members to get them started with the necessary information so that
any prospective students can hit the ground running and integrate into our club seamlessly.